

【Waymo CEO John Krafcik 曾公开表示L5可能永远不能实现,来源:Waymo】
L5或许永远不能实现?
作为自动驾驶行业公认的技术领先者,Waymo CEO John Krafcik 曾公开说到——
「Autonomy always will have some constraints.
自动驾驶永远受到着限制。
It's really, really hard. You don't know what you don't know until you're actually in there and trying to do things.
这真的真的很难,你如果没有真正去尝试过做这件事情(开发自动驾驶),你永远不知道它有多难。」
不是因为别的原因,正是因为技术太难了。
那么这件事情到底有多难呢?
在当下,开发L4以上自动驾驶技术的企业大致分为两派,有一位资深的技术前辈曾跟我详细介绍了这两派技术的异同,我记得他有一个形象的比喻——
【「数据驱动」与「案例驱动」的技术路线竞争,就好比是华山派气宗和剑宗之争。】
在BCG发布的自动驾驶行业报告中,有一张图形象地展现了两种技术路线:
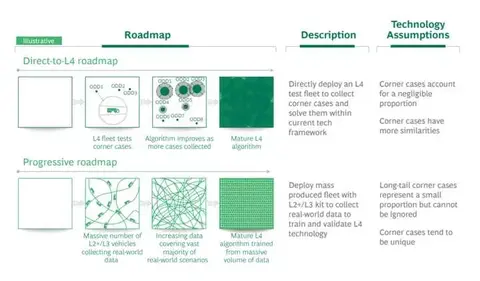
【BCG对两种L4以上自动驾驶技术开发路径的对比分析,来源:BCG】
· 前一种「直接开发L4」路线,即「案例驱动」(Corner-case driven),这一路径以Waymo、Pony.ai及各自动驾驶科技公司为代表,通过不断收集、训练自动驾驶车辆遭遇的边角案例(Corner case),丰富自动驾驶车辆的算法,从而提升其ODD(Operational Design Domain),使其可以适应更大区域的自动驾驶,通过案例的补充和完善,完成自动驾驶技术的开发。
· 后一种「渐进」路线,即「数据驱动」(Data driven),这一路径以特斯拉、小鹏及各强于自动驾驶技术的主机厂为代表的,通过低级别自动驾驶车辆(L2-L3级别)的感知系统,收集真实道路运行数据,通过L2-L3级别的实际部署软件改进,促进车辆的实际辅助驾驶功能迭代,再将所有数据放进一个面向L4以上自动驾驶的大熔炉(特斯拉所谓Neural Network)进行训练,运行影子模式(Shadow Mode),通过指数增长的数据促进L4以上算法的成熟。
上述两种路径,都具备其理论可行性,但实际难度却又相当明显—
· 「案例驱动」路径,仿佛在解棋局,将所有的变化和拆招都囊括进来后,自然万物有解。然而,棋盘大小有限,变化可以通过AI胜过人力的算力来覆盖,但真实道路的运转则变化莫测,Corner case可能本身是难以穷尽的。在道路上意外发生时(例如一辆火车脱轨轰鸣而来),人类总有本能进行瞬时的反应挽救自己的生命,但当这一情况并没有被纳入算法的时候,自动驾驶车辆则将束手无策。诚然,不断收集Corner case让「案例驱动」的自动驾驶车辆性能表现越来越好,但什么时候是「准备好了」的那一天?在每个城市是否又能有同样的表现?至少在当下,很难给出答案。
· 「数据驱动」路径,仿佛在炼金丹,最有效的收集工具莫过于量产车,万事万物都丢进丹炉,日月流转自然练出金丹。然而,我们并不知道量产车收集的是不是有效的素材。诚然,我们看到特斯拉Model 3(图片|配置|询价)的每一个FSD版本迭代都有所提升,但FSD至今运转的算法,都是重新OTA到车型上的L2辅助驾驶能力,与影子模式几无关联。而Model 3的硬件配置已经是几年前的了,它所收集的图像数据未必真正有助于影子模式炼丹。换言之,什么数据是对L4自动驾驶开发真正有用的数据,我们迄今还未必知道答案全集。

【Shadow Mode与实际部署的FSD功能,关联并不大,来源:特斯拉】
在前一种路线,所能做的是不断开发新的场景,不断拓宽车辆的ODD;在后一种路线,所值得尝试的,是将更多的传感器部署到车型上,收集更为全面的数据,尤其是激光雷达。

【激光雷达的搭载或许同时有助于L3以下辅助驾驶功能与L4以上的「炼丹」,来源:小鹏】
所以我们看到小鹏P5、华为HI、智己L7都选择将激光雷达量产上车。一方面是因为标杆功能「城市NGP」需要激光雷达数据辅助实现;另一方面是因为「数据驱动」的炼丹路径,需要激光雷达丰富而真实的数据——只有激光雷达产生的真值(Ground truch)才能真正让模型标注明确什么是正确的结果。因此,行业里有人认为:
「影子模式无价值,没有激光雷达真值的数据集无法做智能驾驶。」
当然,这恰是对特斯拉无激光雷达影子模式的最大质疑。
最后,无论是哪一种路径,在今天看,距离技术梦想的实现都尚需距离。人类其实很容易接受新事物,远比自己想象的容易改变——就在两年前,世界上还是对马斯克、李斌、何小鹏们的质疑,在今天,太多人已经习惯把车开上高速公路,然后放手交给NOA和NGP。
幸运的是,真正困难的只是技术本身而已——但不幸的是,最难突破的,也正是技术本身。
图|网络及相关截图
作者简介:姚昌晟,清华大学汽车工程系博士,从事新能源汽车研究。

 渝公网安备50010502503425号
渝公网安备50010502503425号
评论·0