

看到很多关于特斯拉纯视觉路线的讨论,看到纯视觉可能大家第一印象是对外观的评价,其实不然,特斯拉的“纯视觉路线”指的是特斯拉在自动驾驶系统中仅依靠摄像头和人工智能算法,而不使用激光雷达(LiDAR)或其他类型的传感器(如毫米波雷达)来实现环境感知和自动驾驶功能。
特斯拉的“纯视觉路线”指的是特斯拉在自动驾驶系统中仅依靠摄像头和人工智能算法,而不使用激光雷达(LiDAR)或其他类型的传感器(如毫米波雷达)来实现环境感知和自动驾驶功能。
核心特点技术:
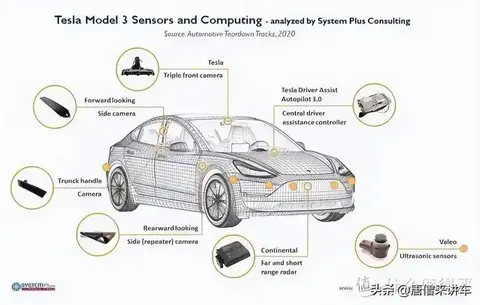
1.特斯拉的自动驾驶系统主要依靠多个摄像头(通常为8个)来捕捉周围环境的图像信息。这些摄像头覆盖车辆的前、后、左、右以及广角视野,提供360度的环境感知。


2.特斯拉通过深度学习和神经网络技术,对摄像头捕捉的图像进行分析和处理。系统能够识别道路、车辆、行人、交通标志、信号灯等物体,并预测它们的运动轨迹。
3.与许多其他自动驾驶公司(如Waymo、百度Apollo等)不同,特斯拉选择不使用激光雷达。特斯拉CEO埃隆·马斯克(Elon Musk)曾多次公开表示,激光雷达成本高且不必要,认为纯视觉方案足以实现完全自动驾驶。
4.特斯拉通过其庞大的车队收集大量真实世界的驾驶数据,用于训练和改进其神经网络模型。这种数据驱动的模式使得特斯拉的视觉系统能够不断优化,适应各种复杂的驾驶场景。
纯视觉路线优点也有很多:摄像头成本远低于激光雷达,有助于降低整车制造成本。摄像头的制造和安装相对简单,适合大规模量产。随着AI和计算机视觉技术的进步,纯视觉方案的性能有望不断提升。
纯视觉路线还存在一些挑战:摄像头在恶劣天气(如雨雪、雾霾)或复杂光照条件下(如强光、逆光)可能表现不佳。摄像头在测距和三维建模方面的精度不如激光雷达,可能影响复杂场景下的决策。纯视觉方案在极端情况下的可靠性仍存争议,部分专家认为多传感器融合方案更安全。
特斯拉的纯视觉路线是一种以摄像头为核心、依赖AI算法的自动驾驶技术路径。它通过低成本、高扩展性的方案推动自动驾驶技术的普及,但也面临环境适应性、精度和安全性等方面的挑战。特斯拉能否成功走通这一路线,取决于其技术突破和实际应用中的表现。 #客观评价特斯汽车的优缺点#

 渝公网安备50010502503425号
渝公网安备50010502503425号
评论·0