
一、车载网络通信系统
1、CAN总线系统
常见的车载网络通信系统有:CAN总线系统、LIN总线系统、LAN总线系统和MOST总线系统,其中CAN总线应用最为广泛。CAN总线系统是BOSCH和Intel公司专门为汽车内部数据交换开发的一种总线系统,高速驱动CAN总线由微处理器、控制器、收发器、两条双绞线、两个数据传输终端组成,低速车身或舒适CAN总线少了终端电阻,可以单根线运行。

CAN总线系统
2、LIN总线系统
LIN总线系统是CAN总线网络下的子系统,是奥迪、宝马、戴姆勒-克莱斯勒、大众、沃尔沃、思卡尔半导体、VCT通信公司提出的一个汽车底层网络协议,应用于汽车传感器和执行器之间的联网。

LIN总线系统
二、车载网络通信方式
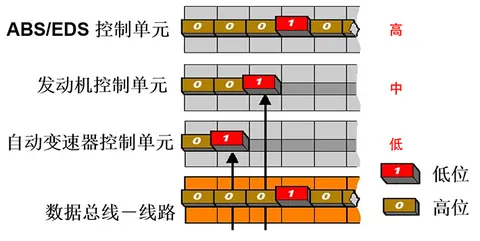
1、CAN通信方式
CAN总线是一种多主控的总线系统,采用优先级原则先后传输信息。CAN信号采用差分电压传输,两条信号线被称为CAN-H和CAN-L。驱动系统CAN静态时都是2.5V左右,此时状态为"隐性",用逻辑“1”表示;驱动系统CAN动态时,CAN-H是3.5V,CAN-L是1.5V,此时状态为"显性",用逻辑“0”表示。舒适系统CAN与驱动CAN系统差分电压有很大的区别,见下图3所示。

图1差分信号传输

图2驱动总线逻辑电平

图3舒适总线逻辑电平
温馨提示
当CAN总线受到点火、手机等信号干扰时,铰接的双绞线同时收到干扰,它们的差值不变,故差分信号抗干扰能力强传输稳定。

图4差分信号稳定
2、LIN总线通信方式
LIN总线采用一主多从的方式组网,数据传输在主节点协调下进行。LIN总线参考地电压是“显性”,用逻辑“0”表示;电源电压是“隐性”,用逻辑“1”表示。

从机向主机传送

主机同时向从机传送

从机向从机传送
三、车载网络通信数据
1、数据结构形式
CAN数据帧由:开始域、仲裁域、控制域、数据域、安全域、应答域、结束域七部分组成,其中仲裁域决定数据传输优先级别。

CAN数据帧
状态域优先权
LIN帧包括帧头和应答两个部分,主机节点里的主机任务负责发送帧头,主机节点或从机节点里的从机任务负责接收帧头,并对帧头所包含的信息进行解析,然后决定是接收应答、不接受应答,还是不做任何反应。
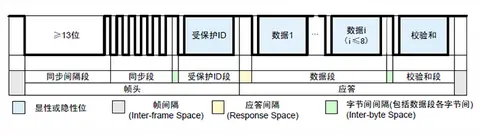
LIN数据帧
2、波形数据分析
CAN典型的故障有:CAN-H或CAN-L断路;CAN-H或CAN-L与电瓶短路;CAN-H或CAN-L与地短路;CAN-H和CAN-L短路。读懂波形比较容易:记住标准波形,判断信号消失为断路,电压拉高或拉低为短路。

驱动CAN标准波形

舒适CAN标准波形

 渝公网安备50010502503425号
渝公网安备50010502503425号
评论·0